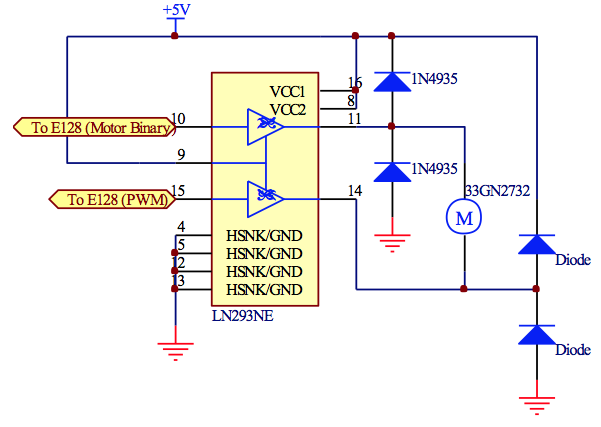
DC Motors
Servo Motors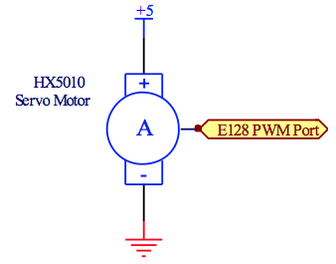
A total of 3 servo motors were used:
1) Ball launch gate 2) Lance movement - horizontal 3) Lance movement - vertical They are all operated by 5V and have a snubber diode for protection. |
Encoders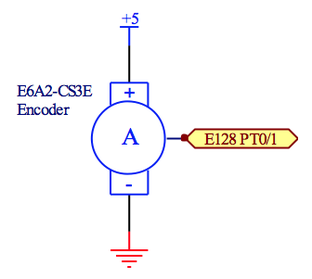
The encoders were mechanically coupled, 1:1, to the output shaft of our motors for control output feedback implementation, specifically proportional-integral (PI) control .
|
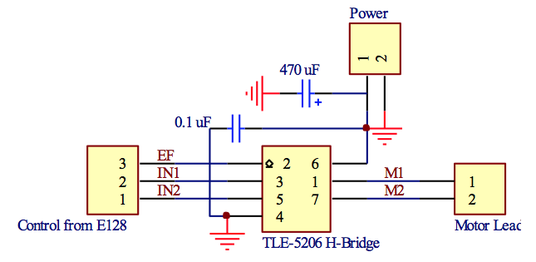
DC Shooting Motor
|
Our ball launcher DC motor used a set of H-bridges with lower peak currents (1A) than the H-bridges used for our drive motors. This offers the flexibility of controlling both directions of the shooting motor, although this added functionality was not implemented in the final strategy and a power MOSFET in series with the motor would have been just fine.
|
