IR Beacon Sensors
|
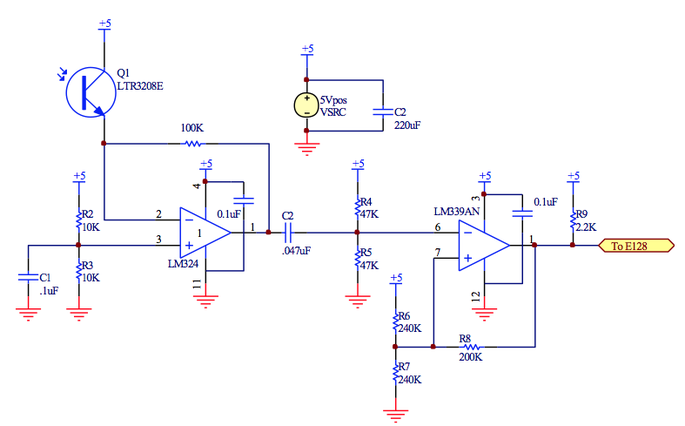
A typical trans-resistive configuration circuit is used here to detect the several IR beacons around the field. Three sensors were used, all with the following configuration.
Current fluctuations due to IR exposure affect the input voltage into a LM324 Op-Amp, which is linearized to go through an AC couple to cancel low frequency room or sunlight noise, and is finally passed to a LM339 comparator with certain hysteresis bounds to transfer the signal into a HI or LO. |
Tape Sensors
|
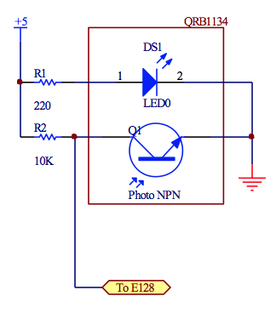
The tape sensor reading was done using analog input into the E128. Since our strategy involved using encoders for movement tracking, tape sensors were only used to detect black tape for realignment. Two tape sensors, one central and one lateral to the robot, were used to do so.
Analog input was chosen for the simplicity involved in the code since the hysteresis for the detection of black is high enough using this current circuit setup (in the order of 4+V). |
